白皮书下载
任务管理
任务管理功能用于帮助用户调度机器人执行流程,用户可以对任务进行新建、修改、执行、停止、删除等操作。
可从三个维度对任务进行分类:
1、产品类型
- PC任务:调度PC流程,指派给PC机器人进行流程运行。
- 手机任务:调度手机流程,指派给手机机器人进行流程运行。
2、复杂程度
- 单任务:只包含一个流程,运行任务即运行此流程包。
- 任务组:可包含多个流程,流程的顺序可以自由调整,实际执行时,任务内的多个流程会按照排序,依次在机器人上执行。
3、触发方式
- 立即执行:任务创建后会立即下发给机器人执行。
- 定时执行:任务创建后会按设置的定时规则下发给机器人执行。
- 手动执行:任务创建后需要在机器人手动点击运行按钮运行任务。
一、查看任务状态及信息
进入任务管理,在列表页面可直观查看任务的状态和主要信息。

二、新增任务
Step1:选择流程

● 任务名称:必填,可自定义输入,不可与已有任务名称重复。
● 选择所属部门:支持选择所属部门,表示给指定部门创建任务,也可通过数据权限查询任务。
● 选择渠道:选择流程的来源渠道,流程管理或流程市场。
● 选择流程:必填,需选择具体使用的流程名称及版本。
- 禁用的流程版本不会出现在可选范围内。
- 同时此处受数据权限控制,若拥有全部权限,可以看到全部流程;若只有部门权限,则只能看到自身所属部门下的流程数据;若只有个人权限,则只能看到自己创建的流程。
- 若创建的任务为任务组,则此处可以选择最多20个流程。
● 录屏:表示任务执行时是否录制执行过程,若为配置则以机器人配置为准;
● 上传控制器:表示录制的执行过程是否上传到控制器,若未配置则以机器人为准。
● 静默运行 Beta:表示任务是否静默运行,若开启此功能任务执行时则不影响电脑端其他操作。
● 预估人工时间:效益分析看板的统计依据,数据来源于【流程管理】处的预估人工时间,如需修改,请在【流程管理】中查找对应版本进行修改。

● 选择版本:流程版本默认为“执行最新版本”,也可选择具体版本;若选择执行最新版本,每次流程更新后任务无需更新,在创建最新的执行记录时会自动更新为最新版本的流程包执行;若选择的是具体版本号,流程更新后任务关联的版本也不会更新,若要执行最新版本流程需要编辑任务更改版本。

● 引用参数:若流程有引用参数时,此处会显示流程包内配置的引用参数,在创建任务时引用参数可选择“使用任务参数”或“使用流程包参数”;
- 使用任务参数:表示当前任务配置的参数值不会根据流程包版本变化而发生变化,不管任务关联的流程包版本如何变化,任务执行时的参数值都使用在创建时配置的值。
- 使用流程包参数:表示当前任务配置的参数值以流程包版本为准,每次流程包版本更新后任务执行的对应参数也会同步更新,若流程包版本未更新,任务执行的参数就和创建任务时配置的一致。

● 云附件:执在流程开发过程中配置的附件,附件可选择控制器文件管理中的文件作为流程的入参数据,被定义为云附件。
- 云附件配置:设计器端流程的 globalConfig参数配置中新增“附件new”控件,在此控件中可选择云端文件,用来获取控制器文件管理中文件作为流程全局参数,其中可选云端文件内容根据用户角色数据权限过
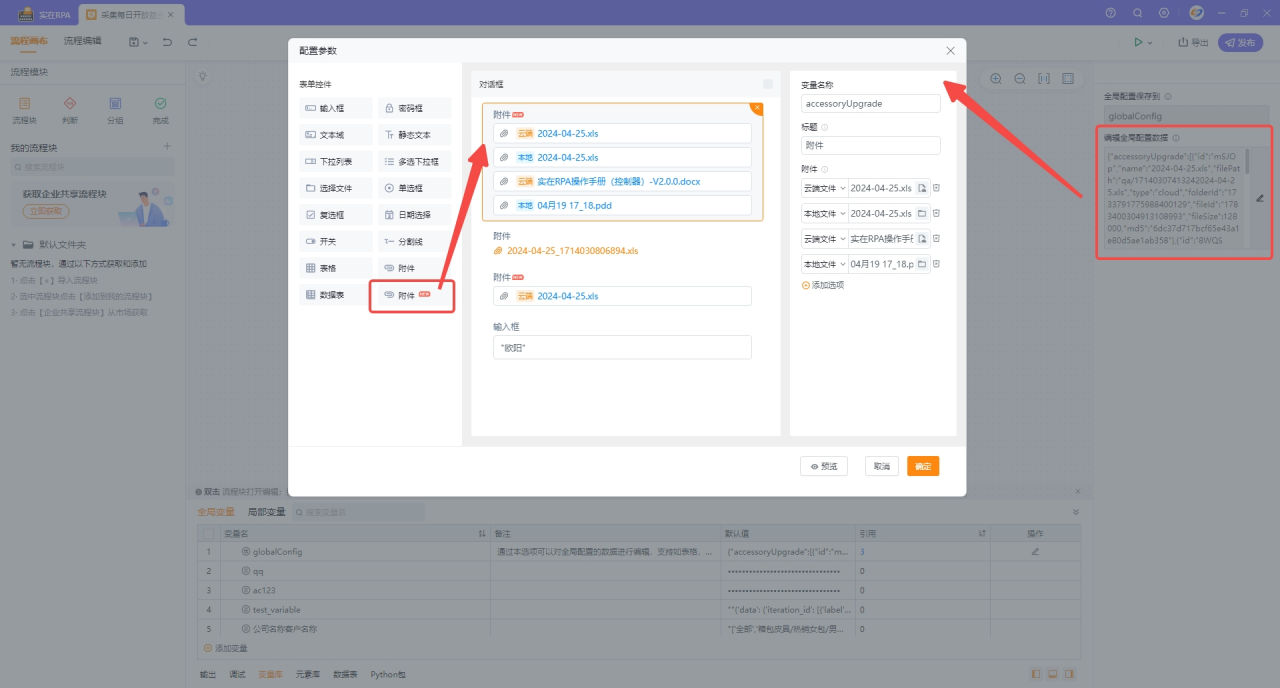
- 云附件使用:流程开发时配置了云端附件,在控制器端创建此流程的任务时可对云附件进行修改、删除、下载操

Step2:选择执行方式
任务支持立即执行、定时执行、手动执行三种模式。其中,手动执行的任务,需要在机器人终端点击执行,并且控制器无法控制其任务的启动;其他两种模式会按照设置的参数执行任务。

-
定时时效:若设置为指定有效时间,则定时任务只会在有效时间内才会执行,适用于某一段时间需要规律执行的场景。设置为长期有效,则该任务会一直按规律执行,永不停止。设置为选择日历,需要添加一个自定义的工作日历,根据日历执行任务
- 每次执行次数:每次执行任务时的重复次数,如需要每天早上8点执行任务10次,只需要在次数填写10即可。
- 等待超时时间:当需要执行的任务很多,但是机器人资源有限时,会存在需要排队的情况。开启等待超时销毁后则排队等待超过设定的时间,则该次执行等待超时后会自行清除,继续执行后面排队的任务,避免大量任务长时间等待造成的任务堵塞。
- 最大排队数量:当需要执行的任务很多,但是机器人资源有限时,会存在需要排队的情况。一旦此任务排队中的待执行记录数量达到设置的最大值,将不再产生新的待执行记录
- 运行超时告警:开启后,当任务超过设定时间仍未执行,则会发送消息进行告警,消息通知方式可配置为:钉钉机器人、企微机器人、站内信;其中钉钉机器人支持@到具体的用户,通过手机号锁定用户;
- 超时未运行告警:开启后,当任务执行超过设定时间仍未完成执行,则会发生消息进行告警,消息告警方式同运行时告警一致。

- 消息接收钉钉机器人:可添加群机器人,可配置@用户,支持添加多个钉钉机器人。
- 消息接收企微机器人:支持添加多个企微机器人。
- 消息接收系统用户:可添加租户内已有用户作为消息接收则,通过站内信接收。

Step3:分配方式
任务支持分配机器人,可以选择自动分配或手动分配模式。
任务支持设置优先级。优先级有1-10多级别,执行的顺序依次为1->2->…->10,当一个机器人上同时存在多个任务时,需要等待所有高优先级的任务执行完成后,才会执行中优先级,最后执行低优先级的任务。
自动分配模式下,控制器将根据当前已在线的机器人及机器人的状态来安排,任务下发给最适合的机器人执行,同时可以选择该任务的优先级。

手动分配模式下,可以选择该任务由具体某一个或几个机器人执行。并且支持在不同的机器人上,执行该任务的优先级不同。

三、查看任务详情
- 点击任务的“详情”,可查看任务的基本信息、任务信息和运行记录,任务信息包括流程的信息、执行方式和相关参数、分配方式和机器人及优先级等。

- 若任务使用的流程已设置使用全局引用参数,那针对此流程可以在详情处点击“引用参数”,进行引用参数的查看和修改。

- 同时支持查看该流程包具体的运行情况统计,按照不同时间和指标维度统计数据。

- 点击“运行记录”可查看该任务每次的执行记录, 支持通过用户名或运行状态来定位某条执行记录,进而查看具体的执行日志和录屏。

● 点击录屏播放按钮,可以查看整个任务运行的全过程。注意:若机器人未开启录屏开关,则此处无录屏记录;若已开启,但未勾选上报至控制器,此处亦无录屏记录。
● 点击日志查看按钮,可以查看任务运行的日志记录。注意:若机器人未开启日志开关,则此处无日志记录;若已开启,但未勾选上报至控制器,此处亦无日志记录。
● 点击参数查看按钮,可以查看任务运行所使用的引用参数情况。注意:引用参数与任务所使用的的流程有关,若流程本身未设置引用参数,则不存在此数据的查看。

四、控制任务
点击具体任务可进行任务的控制,当前支持的控制操作有:新建一次运行、停止所有运行、启动定时器、停止定时器。不同触发类型、不同状态的任务可进行的控制操作会有所不同。

五、编辑任务
任务创建后,可以进行后续的编辑修改。当前支持流程信息、执行信息和分配信息的修改(除执行方式、分配方式)。
注意:任务修改流程仅支持6.0.2及以上版本的机器人,低版本机器人无法更新本地流程包为修改后的流程,会导致执行时仍使用修改前的旧流程。

六、停止/删除任务
● 点击任务列表的停止,可以停止该任务。可停止所有运行或停止定时器。
● 点击“删除”可删除该任务。注意:运行中的任务不支持删除。


